Operating Systems
Back to UWaterloo
OS must handling running many processes, uses ISR's & context switches to handle multiple processes
Requires scheduling to determine which processes run with what order and frequency
Chapter 1
- OS is an abstraction the enbles the use of hardware
- CPUs, Memory, I/O modules, timers, interrupt controller, system bus
- Processing Unit has
-
Memory Address Register (MAR) address for read/write
-
Memory Buffer Register (MBR) contains data
- I/O address + buffer registers
User-visible registers (1 to 64 depending on architecture)
- compilers control them
-
data registers store data
-
address register points to memory
- invisible registers
- program counter cannot be directly modified by the user
- Instruction register is invisible (the instruction itself)
- Program status word contains status information, like coditions, exit codes, flags
Interupts for Peripherals (ISRs)
- non blocking solution
- processor checks for interrupt, store snapshot on stack and execute interrupt handler
- simple model just disables interrupts while running a handler
- lean ISR vs heavy ISR gives you control of what state need be preserved (lean specifies registers to preserve)
Interrupts are mechanically similar to multiprogramming
- ISR jumps with a fresh start, but instead you push the registers onto the control stack and ???
How do you handle interrupts during an ISR?
- You can disable interrupts to stop nested interrupts
- You could have multiple interrupts going on, with priority (this gets into scheduling algorithms)
ARM fast interrupts for sequential interrupt processing uses a single jump instead of jumping back to user program before next interrupt.
- can cause unexpected behaviour, hard to debug becuase it doesn't have to jump back
Context Switching
OS creates an abstraction, running processes; instances of executing programs. Its context consists of registers, vars, program counter)
- Multiprogramming environment has independent sequential processes, only one is active at once
- OS keeps processes in a process table (Process Control Block)
- a context switch or task switch is switching the CPU from one process to another
-
context is the contents of the CPU's registers and PC at any point
- consists of suspension of one process and resuming of another
Context switch steps:
- Save context of CPU
- Schedule next process for execution
- Load new context of CPU
Embedded Parallel Operating System (EPOS) for labs
Scheduler
scheduler decides which process to run at a certain time & how long it runs
- part of OS process management subsystem
- executes scheduling algorithm
Scheduling algorithm
- consists of job queue, ready queue, CPU, and I/O waiting queue
- scheduling decision is made when new process is created, process exits, a process gets blocked, or an I/O interrupt occurs
3 types of scheduling algorithms (high level categories)
- all need some sort of fairness, balance, and policy enforcement
- batch (payroll)
- max trhoughput
- keep CPU busy
- realtime (deadlines)
- meet deadlines, predictibly
- interactive (desktop)
- respond to requests quickly
Preemptive scheduling is the act of interrupting a task with a context switch, with the intention to resume later
Algorithms
Round robin uses timer interrupts
- time too short is expensive for context switches, too long might not be fair
- preemptive
Priority scheduling runs processes in priority (static or dynamic)
- extends priority class
- non-preemptive, but may use round robin for tiebreaking priority
First come first server (will extend priority)
Implementation
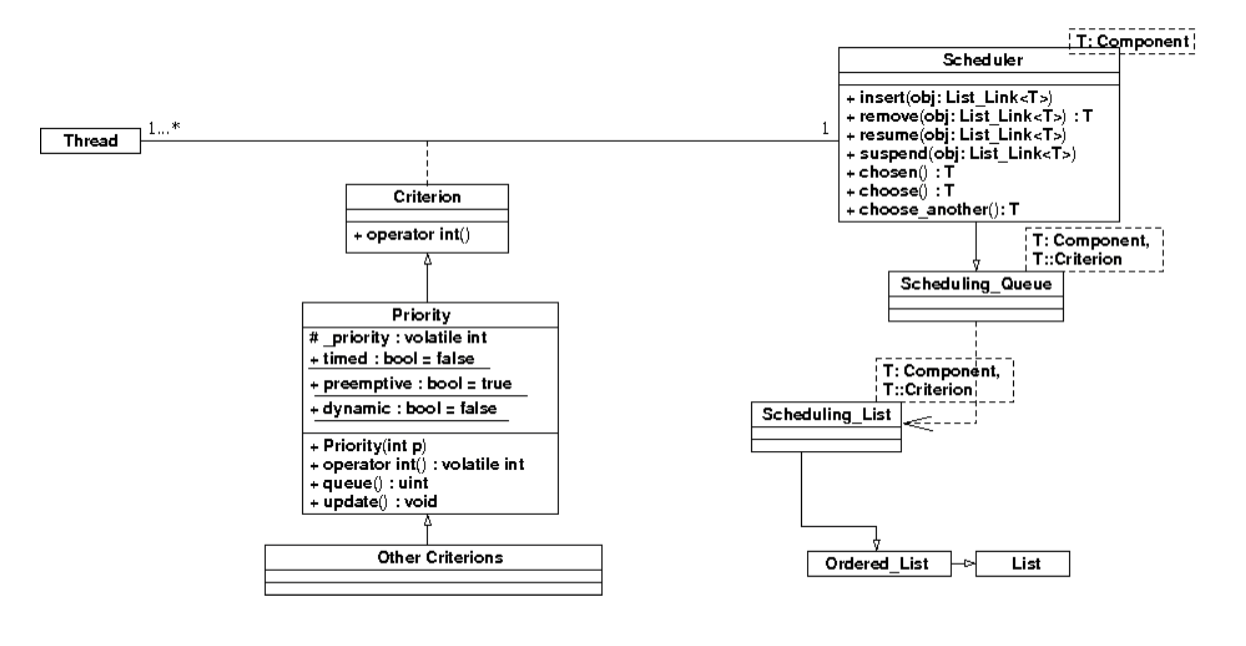
Traditionally implemented with a hiearchy of abstract Scheduler classes
EPOS instead uses composition? to detach scheduling policy and data structure mechanism and criteria
- so it has a thread object (process execution instance), criterion, schedluer mechanism (queue for example)
Multiprogramming
More than one program to execute
- same mechanism for ISR, but instead is used to switch between programs depending on priority
-
busy waiting is basically polling of a status register
- important for systems that need extremely low latency (skips context switch)
- interrupt-driven waits for an interrupt from I/O module
Chapter 2
Operating System
A program that controls execution of other programs to help them by acting as a standard interface between application and hardware
- convenience, efficiency, ability to evolve
- we have layers so that programmers can focus on their specific layer (application layer) without worrying about lower level things like file systems
- provide services, things like
ulimit -a
ulimit controls limitations within the shell and its forked processes
The OS manages computer resources. Kernel is the portion of OS that is in main memory, containing frequently used functions.
/procs/ demo
- bunch of pid directories, with some info about the processes
-
nucleus
Processes
Virtual Memory uses swap disk of some form (alternative memory medium) to create the illusion of more memory
- abstraction that you put between
Paging
Chapter 3
How OS deals with processes, first understanding of states of processes and how to manage them.
Uniprocessor interleaves execution of processes, while multiprocessor has parallel execution of processes
How does the OS manage processes
A process is a program in execution, a unit activity with a sequence of instructions, and state
- executable program, associated data, and execution of the program
Process elements include PID, state, priority, memory pointers (shared memory blocks), context data (PSW, counter, registers), I/O status info, accounting info (process time, time limit, threads)
Process Control Block is the data structure that contains the process elements
- allows support for multiple processes
- should not allow users to manipulate the process control block
For sharing CPU, a single processor system works as follows: task switcher triggers after timeout (quantum size, say after for example 6 instructions) or after I/O request, switch to dispatcher that switches processes
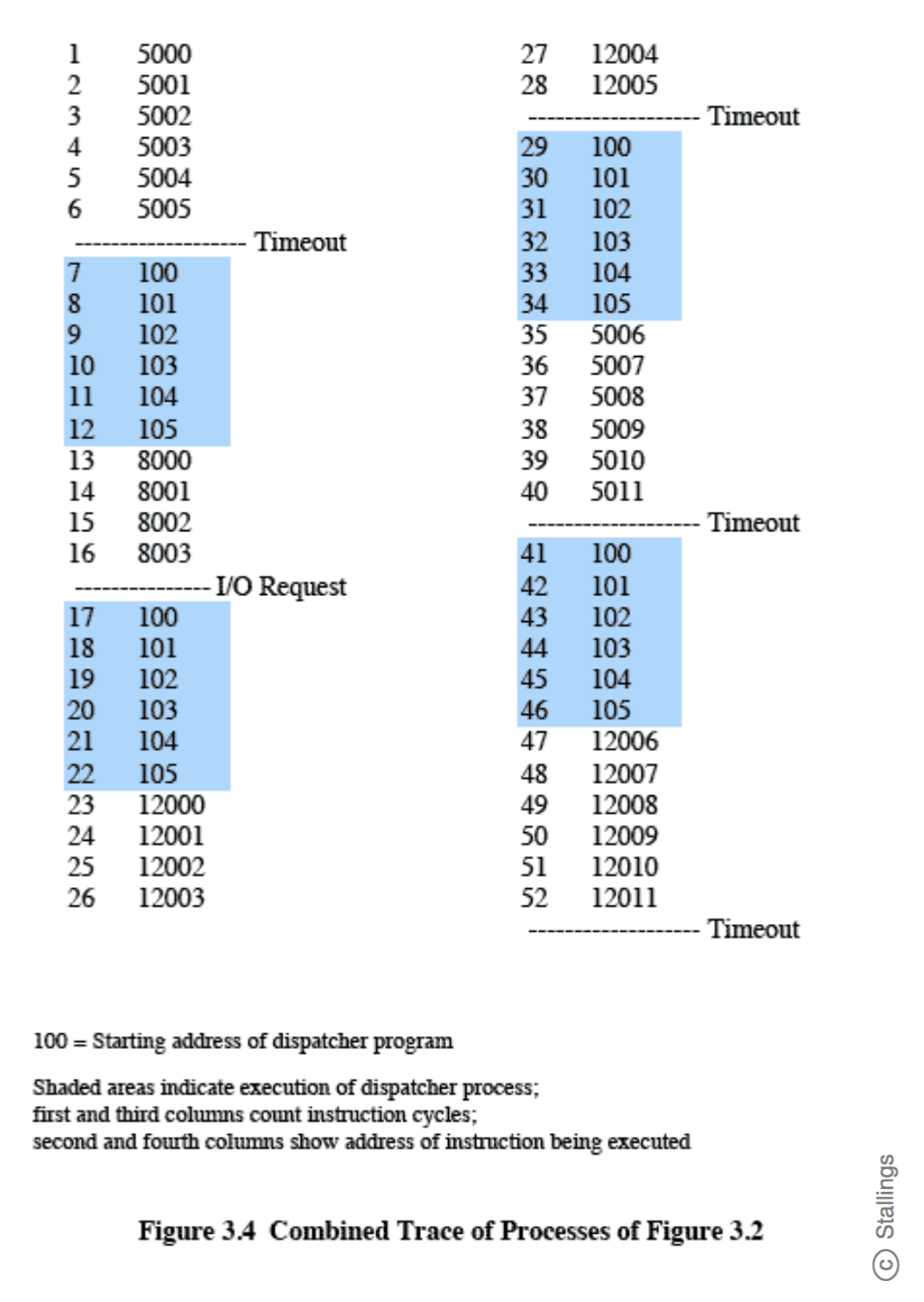
Longer quantum size means less wasted cycles on dispatcher, but lower responsiveness (longer wait time till first instruction for processes scheduled later)
Two state process model says a process is either running or not running
- naively, we can use a queue for round robin scheduling
Processes are terminated if
- completes normally
- time limit exceeds (
ulimit)
- memory unavailable
- error (bounds, protection, arithmetic, I/O)
- deadlock, resulting in the OS killing it
- parent termination
Core dump